Delta-v: Support spacecraft and mining robots (minor spoilers) Here's a compendium of support spacecraft that make an appearance in Delta-v. Some of these systems, though based on scientific principles, are currently fictional (such as the Mule utility craft and the modular robotic return tugs). Other systems shown here are designs proposed by NASA or private aerospace companies (these include the X-33, the asteroid return mission robot, and also the TransAstra Honey Bee). Still others are currently being prototyped by NASA (as is the case with the Valkyrie telepresence humanoid robot). More details for each can be found below... |
|
 |
|
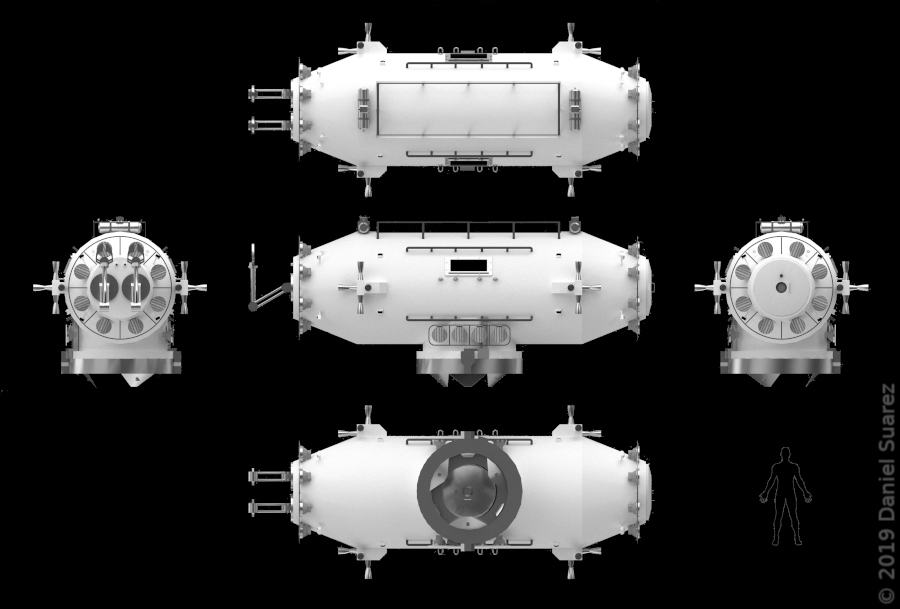
Image 1 - An orthogonal view of the mule utility craft developed by the fictional Catalyst Corporation. This small, durable work horse spacecraft serves both as a human crew transport and a heavy telepresence unit and was designed to support asteroid mining operations. Based from a nearby mothership, the highly flexible design means its interior can be pressurized and the mule directly piloted, with up to two human crewmembers, or (more commonly), the interior of the mule is loaded with extra thruster gas tanks and battery sleds to extend telepresence operations. (Rendering by Anthony Longman) |
|
 |
|
Image 2 - I created this early Sketchup model of the mule utility spacecraft used by the asteroid miners in my novel. The Konstantin mothership is equipped with four such mule utlity spacecraft, docked at its upper airlock. Each mule is equipped with dual robotic arms, work and search lights, dual planetary winches, lidar scanners and plenoptic cameras on all sides to facilitate both manual and teleoperation. Handles and running boards on the starboard and port sides facilitate miners riding on the exterior of the craft while on EVA. Eyelets are provided for attaching EVA tethers. The running boards are positioned leeward of all thrusters.
|
|
 |
|
Image 3 - Each mule is equipped with an aft exterior hatch primarily used to install and remove extra thruster gas tanks and battery sleds when transitioning the craft between manual and teleoperation modes. However, the aft hatch can also be used as an emergency exit during manual operation. The cargo rack is located atop the mule, between the planetary winches and positioned leeward of all thrusters to prevent cargo/tools from being accidentally jettisoned during manuevers. Note that the mules are *not* equipped with solar panels because most asteroid mining operations occur in the shadow of Ryugu in order to protect against solar flares. The added mass of seldom-used solar panels would otherwise reduce the spacecraft's delta-v. |
|
 |
|
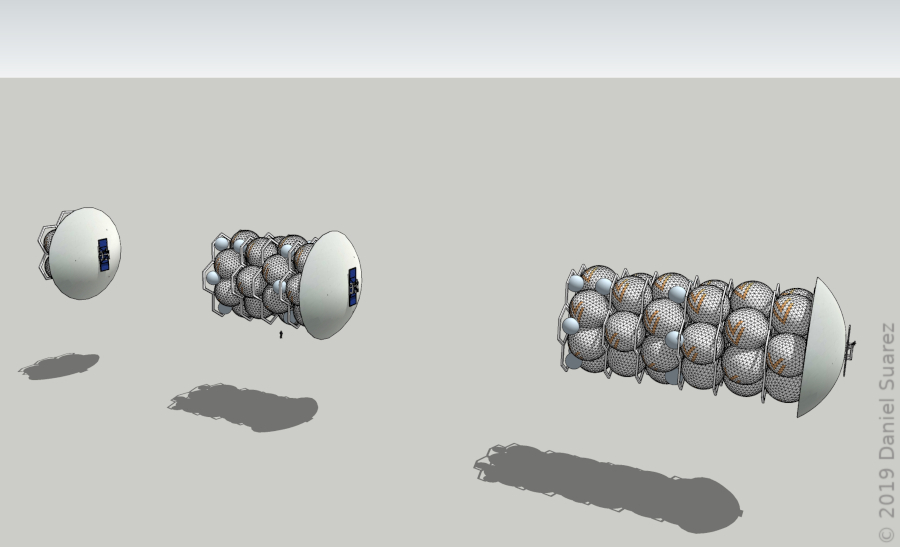
Image 4 - Sketchup models of the modular robotic tug design used to return mined asteroid resources to cislunar space. These craft are constructed in-situ by the crew of the Konstantin from digital plans designed by Catalyst Corporation engineers, and using resources harvested from the asteroid, Ryugu. Note that these robot tugs have minimal superstructure and almost no hull -- only the front solar shield necessary to protect the water ice, nitrogen, and other volatiles from direct sunlight. This Spartan design minimizes mass and thus the delta-v required to propel the resources toward an encounter with Earth's Moon, maximizing the yield from mining operations. Depicted (from left to right) are 1,000 metric ton, 4,000 metric ton, and 6,000 metric ton shipments. A human figure is shown beneath the middle craft for scale. |
|
 |
|
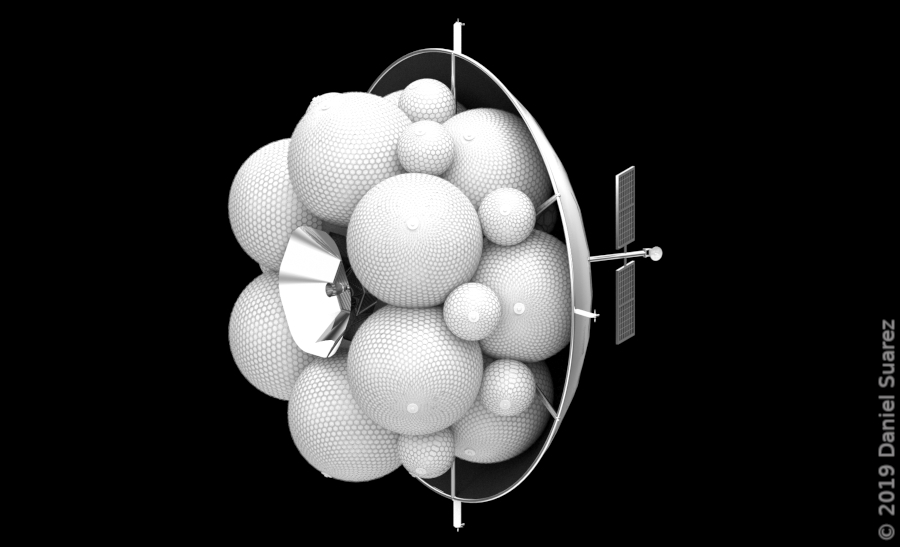
Image 5 - A draft robot tug 3D model, in this case for a 1,000-ton return shipment.. The base lattice framework is printed and assembled by another robot system (see Video 6 below), and then the spherical, cable-netting-reinforced polymer bladder tanks are attached to that framework -- causing these robotic tugs to resemble a 'bundle of grapes'. Though ungainly in appearance, this design is highly efficient, since the tugs do not need to be aerodynamic and they perform only two burns -- one on departure and another post-injection burn on arrival in cislunar space to put them in a lunar distant retrograde orbit.
The spherical bladder tanks are 3D-printed in 7-meter and 3-meter sizes (holding 180,000 and 14,000 liters respectively). The larger tanks are used to contain lower mass resources such as water ice, liquid nitrogen, ammonia, carbon dioxide, etc., while the smaller tanks store denser materials such as frozen iron, nickel, and cobalt carbonyls. The robotic tug's propulsion systems are cannibalized from the mothership and mounted on the tug's core frame, with the solar shield, front solar panels, and control systems and software added based on Catalyst Corporation design specs. Astrogation and guidance systems are standardized and calibrated by mission control back on Earth after the overall mass and center of mass for the shipment is determined. |
|
Video 6 - The Archinaut space-based 3D printer and assembly robot, proposed by real-life tech startup, Made in Space. These machines are utilized by my fictional asteroid miners to build the latticework frames of the robotic return tugs, frameworks for resource storage yards, and more.. (Company link here: Made In Space)
|
|
 |
|
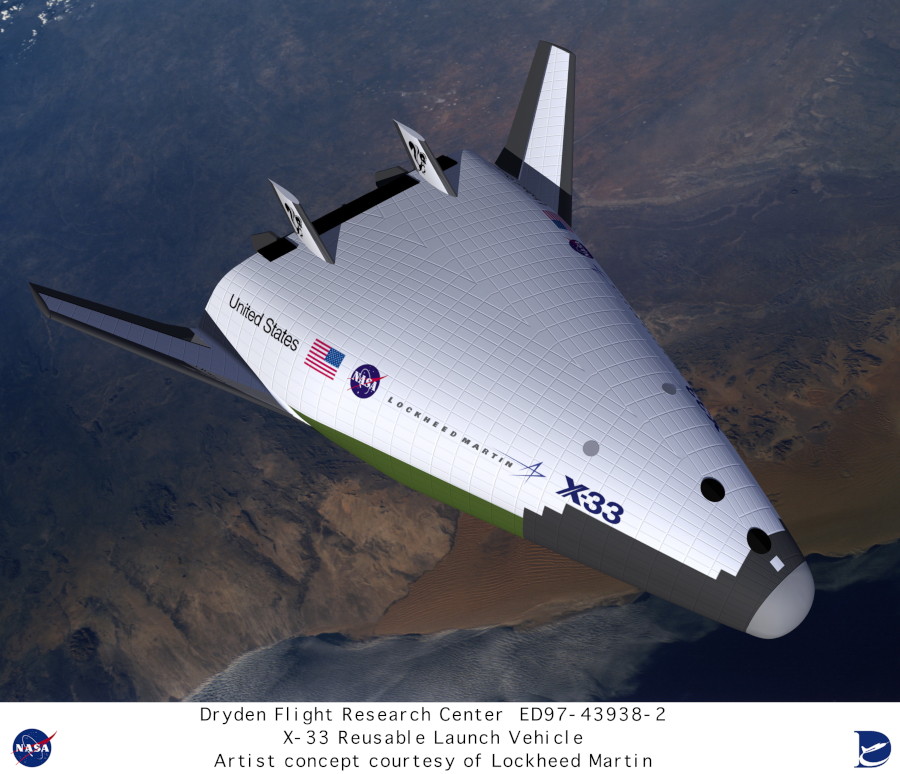
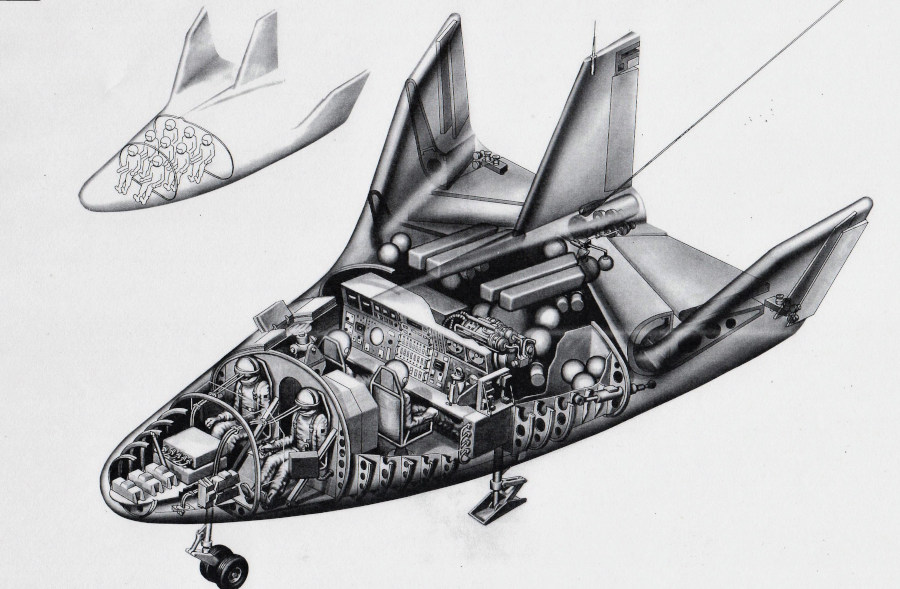
Image 7 - The 'lifting body' spacecraft in my book was loosely based on designs like the X-33. The X-33 was an unmanned, in-atmosphere technology demonstrator for a future single-stage-to-orbit and lifting-body spacecraft called VentureStar. Designed by Lockheed Martin in the 1990's, the X-33 was reusable and could also land using retro-rockets, much like today's Falcon 9 boosters. Prototypes were actually built and tested. However, the project was cancelled in 2001.
You can learn more about the X-33, VentureStar, and the aerospike rocket engine here: Lockheed Martin X-33 |
|
 |
|
Image 8 - Lifting body orbital spacecraft have been in various phases of development since the 1960's -- such as this Martin Marietta HL-10 concept model from 1967. The inset image in the upper left shows a configuration with room for 8 passengers. This craft was designed to glide in from orbit like the space shuttle, as was the earlier X-20 Dyna-Soar.
|
|
 |
|
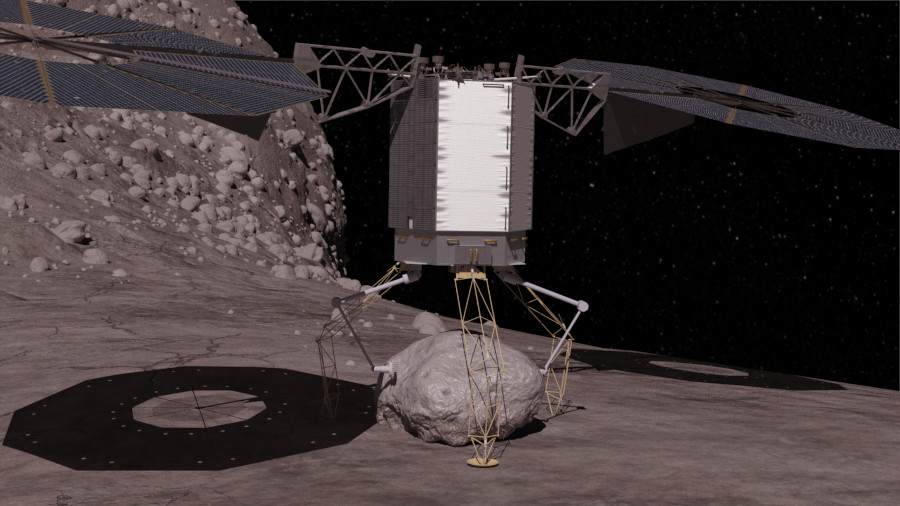
Image 9 - My fictional space miners make use of a robot called the 'Asteroid Retrieval System' to pull suitable boulders from the surface of Ryugu. However, that system is not entirely fictional; it's based on a design for the Asteroid Redirect Mission that NASA proposed in 2013. The mission goal was to rendezvous with an asteroid, retrieve a boulder from its surface, and return that boulder to a stable lunar orbit for closer study by a follow-up manned mission. Slated to launch in December 2021, the ARM mission was instead defunded in NASA's 2017 budget. Prototype development was scrapped.
|
|
 |
|
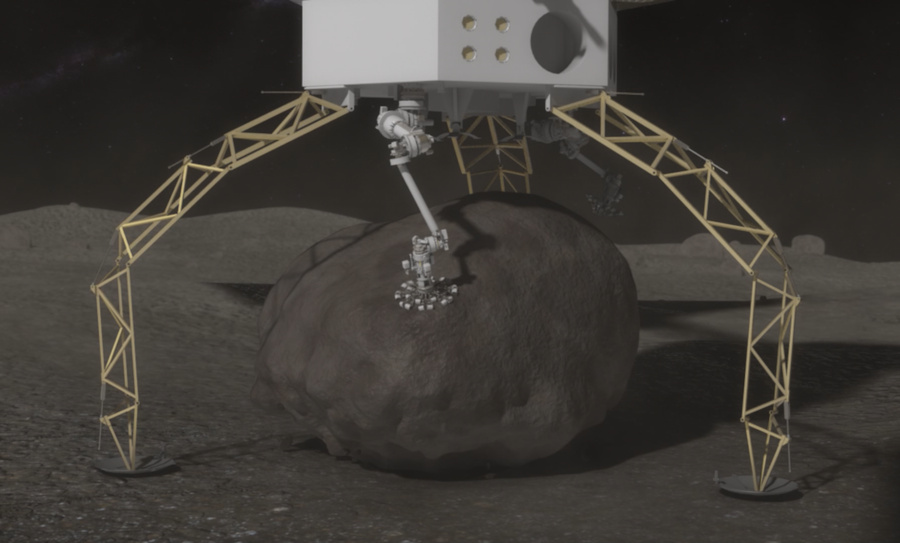
Image 10 - A close-up view of the ARM probe straddling a 10-meter diameter boulder with 18-meter-long legs. Once landed, robotic arms descend from the base of the probe, drilling into the boulder surface. They clamp down prior to tensioning the legs and 'spring' from the asteroid's surface with a couple hundred tons of mass in its grip. This concept saves on rocket fuel (and thus delta-v) by directly pushing off against the asteroid surface.
|
|
Image 11 - In this view the ARM has already departed the asteroid surface and curled its legs around the boulder to further secure it before firing its ion thrusters, sending it on a trajectory back toward Earth's moon.
|
|
Image 12 - The optical mining robots deployed by my fictional asteroid miners are not entirely fiction, either. They're based on designs developed by the real-life asteroid mining startup, TransAstra. You can learn much more about optical mining and their current designs here: TransAstra.
|
|
 |
|
Image 13 - Real space walks are risky and also increase radiation exposure. That's why my fictional asteroid miners use humanoid telepresence robots along with sophisticated VR headsets for exterior work whenever possible. VR telepresence rigs with millisecond response times are possible when the operator is close to the work site, as is the mining ship Konstantin.
My book depicts the miners using later generation Valkyrie robots, originally developed at NASA's Johnson Space Center. |